,有助於車隊管理員管理駕駛行為、運動感測、急煞車和衝擊偵測.jpg?timestamp=1689918406.42007)




自主移动机器人应用的普及是必然的趋势
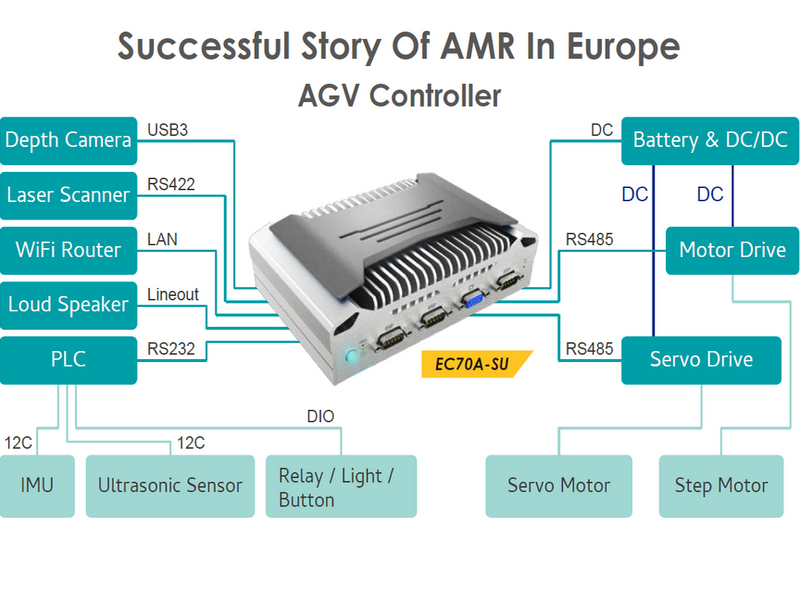
DFI EC70A-SU/EC70A-KU系列完美结合令人惊艳的外观设计以及优异的运算效能,以高效第六代 Intel® Core™ i7/i5/i3 处理器为基础,提供顶尖处理效能、无风扇的散热科技,专为空间有限且效能需求高的解决方案而设计,如新兴的自主移动机器人(AMR, Automated Mobile Robot)。
区域:欧洲
国家:丹麦
应用:运输用自主移动机器人
近年来,随着人工智能应用的普及,与二十四小时全球化物流的发展,以电子商务与制造业为主的产业,对于移动式机器人的需求,持续水涨船高。
受到新冠肺炎(COVID-19)肆虐全球的影响,大众为了避免染疫而避免外出,不仅激增电子商务订单,各大电商必须扩大布署自主移动机器人(AMR,Autonomous Mobile Robot)和自动导引车(AGV,Autonomous Guided Vehicle)。
因疫情加剧而扩大的劳动力缺口,让各大经济体须重新规划制造业与供应链,且基于就近生产、减少人力资源、提高生产效率等种种考虑,势必带动机器人产业的成长,预期2020年全球移动机器人的市场收入将成长25%、2021年增长50%,在2024年全球移动机器人的市场营收,将达到87.9亿美元,其中制造业的投资金额约50亿美元。
其中AMR因无须像AGV须布署在事先规划的环境(如改建厂房、铺设轨道、整平地面),整体布署成本较高,也较难应付意外状况,如运输过程中一旦遇到障碍物只能暂停运作。所以随着自驾车导航技术的成熟,拥有自主导引、机器视觉、和地图建构能力的AMR,相当于一辆装载GPS和预装地图的自动车,可自动判断最有效的路径并绕开障碍物,对于仓库基础条件较差、地面沈降严重的地区,更需要AMR的越障能力与环境适应性。也因此,有鉴于更高的应用布署弹性,AMR成为制造业、物流仓储和医疗保健等领域,优先采购的产品项目。
更聪明的机器人需要更可靠的运算心脏
但比AGV更聪明的AMR,需要更加强大的运算效能、整合更多样化的传感器、与承受不同环境的耐用性。
整体来看,其运算控制单元须符合以下条件。
- 高效能。
- 具备高速执行各式各样机器人控制软件的效能表现,并保有未来升级软件的余裕。
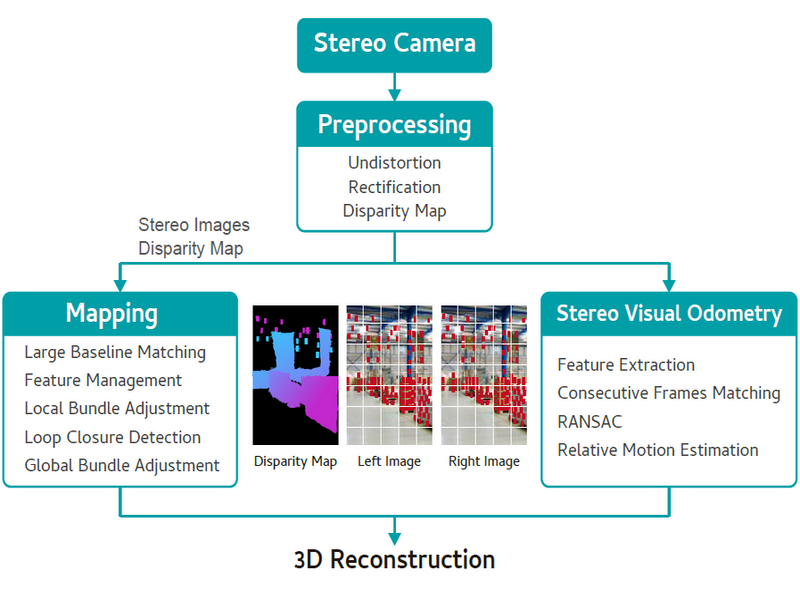
- 可实时计算定位与地图构建算法。
- 完整的I/O界面。
- 易于整合广泛的传感器与制动器。
- 可接收来自深度摄影机的高速视讯串流与激光雷达(LiDAR)的数据串流。
- 低功耗。
- 延长电池运作时间。
- 减少电池频繁充电而带来的耗损。
- 对恶劣环境的抵抗力。
- 可在宽温环境长期运行,抵抗讯号干扰,并承受移动过程中的振动。
- 更长的平均故障间隔(MTBF,Mean Time Between Failures)、更低的平均失效前时间(MTTF,Mean Time To Failures)与更短的平均修复时间(MTTR,Mean Time To Repair)。
- 强固的无线网络。
- 稳定且可靠传输数据与控制命令。
- 便利的自我检测与远程故障排除。
- 较小的尺寸。
- 便于系统整合。
- 提高机器人的机构设计弹性。
近年来Intel NUC(Next Unit of Computing)带动了小巧计算机的风潮,也成为部份机器人厂商在产品开发初期的首选,但个人计算机应用导向的NUC与类似产品,却难以满足以下需求。
- 高可靠度与产品寿命。
- 多元的传感器界面,如雷射扫描仪常见的RS-422。
- 对抗震动与讯号干扰所导致的效能减损。
如果采用ARM指令集架构的系统单芯片平台(如nVidia Jetson Xavier),受限于效能瓶颈难以迅速应对需求改变的难题。所以机器人需要工业计算机等级的运算控制单元,并充分利用x86生态系统通用与开放的软件资源,才能确保可靠性与耐用性,提高运作效率,降低整体使用成本与总体资本支出。