,有助於車隊管理員管理駕駛行為、運動感測、急煞車和衝擊偵測.jpg?timestamp=1689918406.42007)




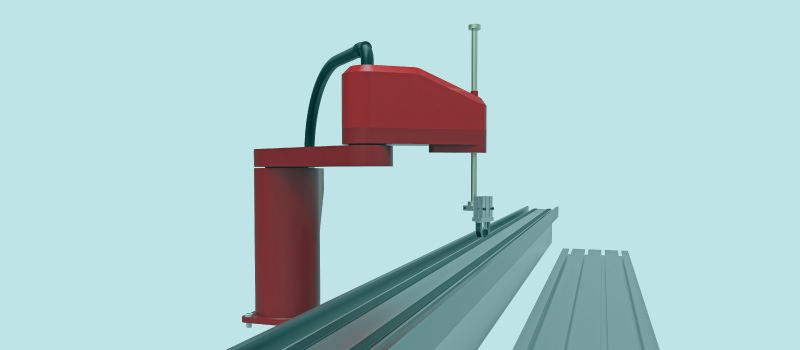
水平多关节机械手臂 (SCARA)
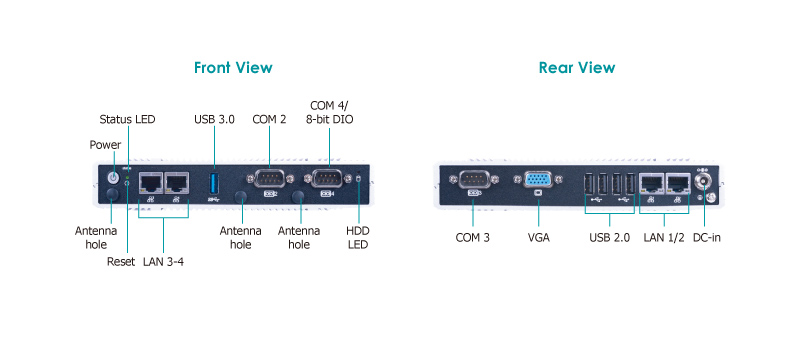
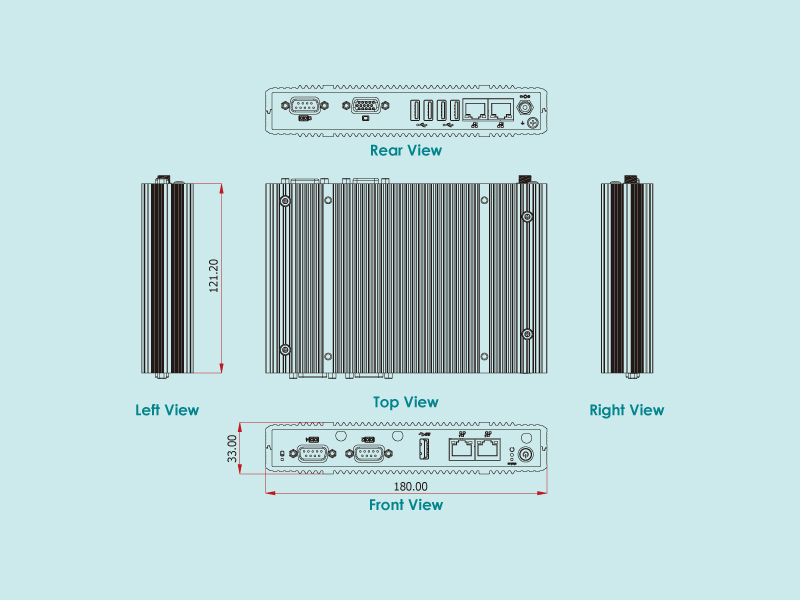
水平多关节机器人 (SCARA) 是一种圆柱坐标型的特殊类型的工业机器人,一般有4个自由度,可在包括沿X、Y、Z方向的平移和绕Z轴的旋转。水平多关节机器人的特点是负载小、速度快,因此其主要应用在快速分拣、精密装配等3C行业或是食品行业等领域。像IC产业的晶圆、面板搬运、电路板运送、电子组件的插入组装,都可以看到SCARA机器人的踪迹。藉由板载内存带来的高可靠度与符合客户需求的多端口以太网络,DFI EC700-BT3054协助客户打造控制精准的水平多关节机器人。
区域:中国
产业:自动化产线
应用:水平关节机器人 (SCARA)
解决方案:EC700-BT3054
水平多关节机械手臂 (SCARA, Selective Compliance Assembly Robot Arm或Selective Compliance Articulated Robot Arm) 是一种特殊组态的机械手臂,是在1981年由日本厂商所提出的新型组装用机器人概念,其特点是负载小、速度快,因此其主要应用在快速分拣、精密装配等3C行业、食品行业等领域。
水平多关节机械手臂在Z轴方向具有刚性,在XY方向则可以弯曲。根据SCARA平行轴的结构,其手臂在X-Y方向有顺应性 (compliant),但在Z方向具有刚性,因此其名称为「选择顺应性」。此特性在平面组装作业上有其优势,例如将一根圆销插入圆孔中。
水平多关节机械手臂的另外一个特性,是其二个手臂的关节结构类似人类手臂,因此名称中会有「关节」(Articulated) 一词,此特性可以让手臂进入一些狭窄或受限的区域,然后以折迭或的方式退出该区域。这有利于在将施工料件,从一个封闭的工作站移动到另一个工作站。
相较于传统的笛卡尔坐标机器手臂,SCARA的反应会比较快,设备也会比较干净,其单座的安装座需要的占地面积较小,因此采取可以较简单、无阻碍的安装方式,但也需要更精确的软件控制,如支持EtherCAT (Ethernet for Control Automation Technology) 网络的系统控制软件。