,有助於車隊管理員管理駕駛行為、運動感測、急煞車和衝擊偵測.jpg?timestamp=1689918406.42007)




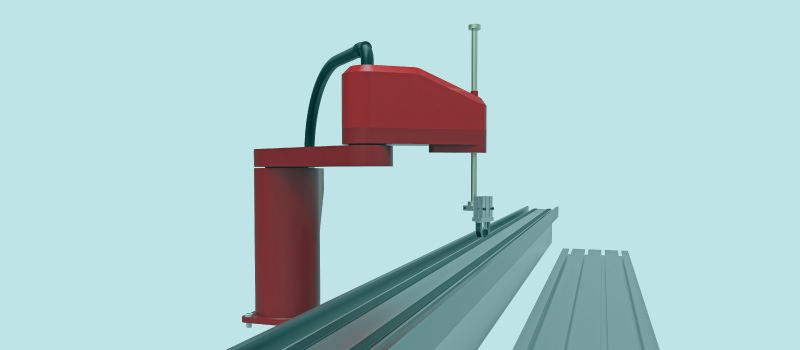
SCARA
SCARA ist eine ganz bestimmte Art von Industrieroboter mit zylindrischen Koordinaten. Er hat in der Regel 4 Freiheitsgrade, einschließlich Translation entlang der X-, Y- und Z-Richtung und Rotation um die Z-Achse. Der SCARA zeichnet sich durch eine geringe Last und eine hohe Geschwindigkeit aus, so dass er hauptsächlich in 3C-Industrien wie Schnellsortierung, Präzisionsmontage oder in der Lebensmittelindustrie eingesetzt wird. Die Spuren des SCARA sind in der Wafer- und Plattenhandhabung, dem Leiterplattentransport und dem Einsetzen und Montieren von elektronischen Komponenten in der IC-Industrie zu sehen. Mit der hohen Zuverlässigkeit, die der Onboard-Speicher mit sich bringt, und dem Multi-Port-Ethernet, das die Anforderungen der Kunden erfüllt, unterstützt der DFI EC700-BT3054 die Kunden bei der Erstellung präziser SCARA.
Region: China
Industrie: Automatisierte Produktionslinie
Anwendung: SCARA
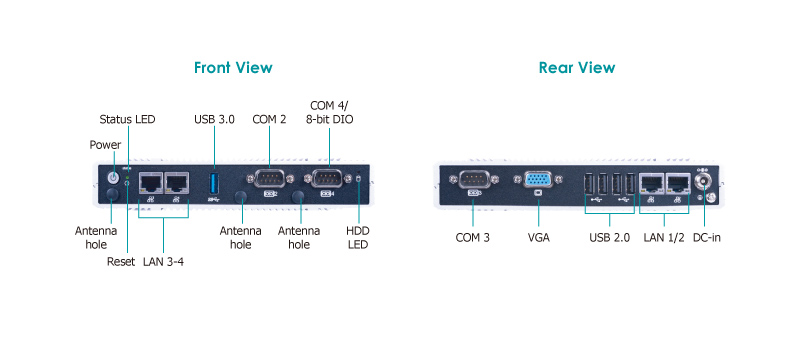
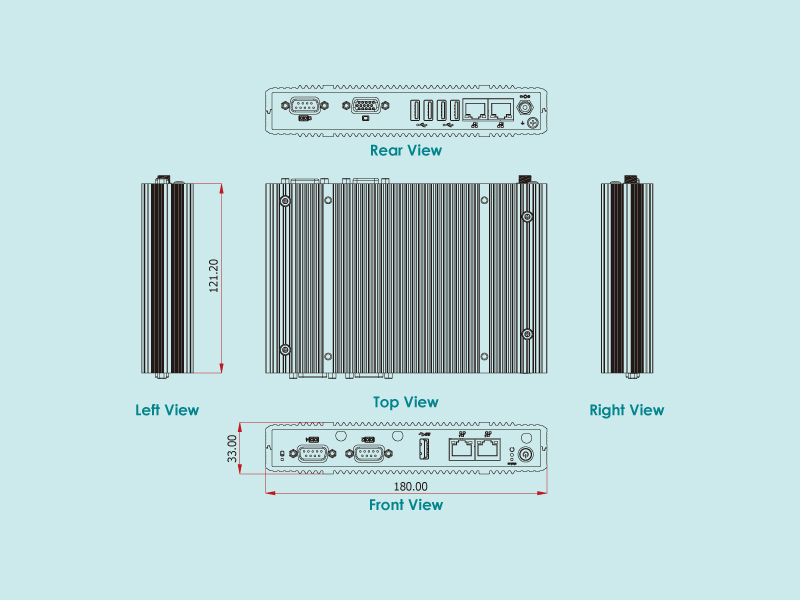
Lösung: EC700-BT3054
SCARA (Selective Compliance Assembly Robot Arm oder Selective Compliance Articulated Robot Arm) ist ein speziell konfigurierter Roboterarm. Er ist ein neues Montageroboterkonzept, das 1981 von einem japanischen Hersteller vorgeschlagen wurde. Er zeichnet sich durch eine geringe Last aus. Gleichzeitig ist die Geschwindigkeit hoch, so dass er hauptsächlich in der schnellen Sortierung, der Präzisionsmontage, anderen 3C-Industrien, der Lebensmittelindustrie und anderen Bereichen eingesetzt wird.
Der SCARA-Roboterarm hat Steifigkeit in der Z-Achsen-Richtung und kann sich in der XY-Richtung biegen. Entsprechend der SCARA-Parallelachsenstruktur ist sein Bauteil in der X-Y-Reihenfolge nachgiebig, aber in der Z-Richtung starr, daher der Name "Selektive Nachgiebigkeit". Diese Eigenschaft hat Vorteile bei planaren Montagevorgängen, wie z. B. dem Einsetzen eines runden Stifts in ein rundes Loch.
Ein weiteres Merkmal des SCARA ist, dass die Gelenkstruktur seiner beiden Komponenten einem menschlichen Arm ähnelt, daher kommt das Wort "articulated" im Namen vor. Diese Eigenschaft ermöglicht es dem Arm, in einige enge oder eingeschränkte Bereiche einzudringen und diese dann durch Einklappen zu verlassen. Diese Eigenschaft ist förderlich für den Transport von Montagematerial von einem geschlossenen Arbeitsplatz zu einem anderen.
Verglichen mit dem traditionellen kartesischen Koordinaten-Roboterarm reagiert der SCARA schneller, und die Umgebung der Anlage ist sauberer. Darüber hinaus benötigt seine Einsitzer-Montage eine kleinere Stellfläche, so dass er einfacher und ungehindert installiert werden kann. Aber er benötigt auch eine präzisere Softwaresteuerung, z. B. eine Systemsteuerungssoftware, die EtherCAT (Ethernet for Control Automation Technology) unterstützt.