より多様なセンサーとの統合が求められます、より複雑なリアルタイムマシンビジョン解析
無人搬送車(AGV)は、事前に計画された環境で導入する必要があるため、全体の導入コストが比較的高く、不測の事態への対応も困難である。例えば、搬送中に障害物に遭遇した場合には、一旦運転を中断するしかありません。そこで、自律誘導機能、マシンビジョン機能、地図再構成機能を備えた自律型移動ロボット(AMR)であれば、最も有効な経路を自動的に判断して障害物を回避することができます。AMRの障害物回避能力と環境適応性が、より複雑な工場や倉庫での配置に必要になってきています。
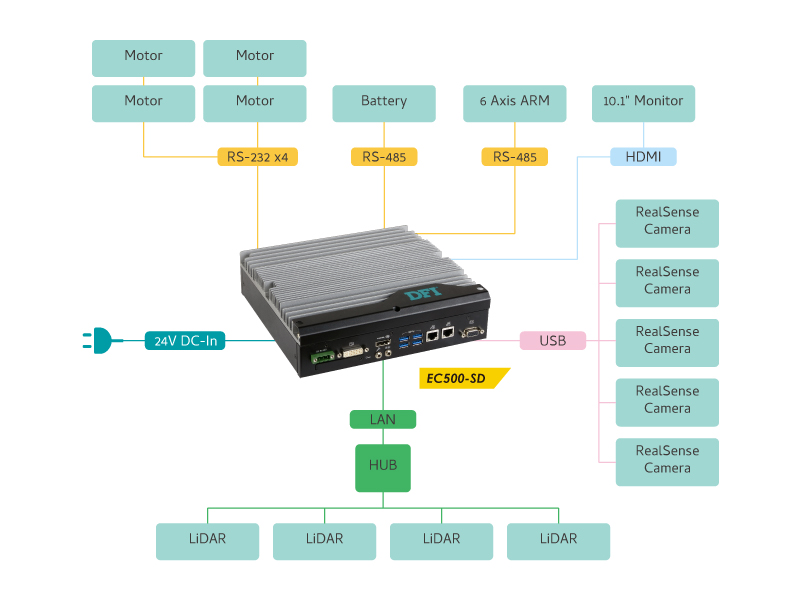
しかし、自律型移動ロボットには、測位のためのデプスカメラやレーザーレーダー、長距離の衝突を防止するためのレーザースキャナー、近距離衝突を検知するための超音波センサー、各種無線ネットワークの仕様や制御運転技術など、より多様なセンサーとの統合が求められます。台湾の世界的に有名なICパッケージング及びテスト企業は、当初産業用コンピューターソリューションを使用していましたが、COMポートやUSBユニットの数が不足しており、また追加のコントローラーが必要でした。
複雑なセンサーの完璧な統合に加えて、自律型移動ロボットは、より複雑なリアルタイムマシンビジョン解析、SLAM(自己位置推定と環境地図作成の同時実行)アルゴリズム、カスタマイズしたアプリケーションプログラミングインターフェース(API)、より高度なシステム統合を実行し、シームレスな互換性を確保して実行のパフォーマンスを最大化する必要があります。最後に、企業の生産ラインの運用要件を満たすICパッケージングとテストのためには、産業用ディスプレイを設置する必要があります。つまり、最も適切に設計された自律型移動ロボットを構築するためには、産業用コンピューターメーカーのシステム統合(SI)サービスが必要となります。







,有助於車隊管理員管理駕駛行為、運動感測、急煞車和衝擊偵測.jpg?timestamp=1689918406.42007)